

ข้าวโพดเป็นอีกหนึ่งพืชเศรษฐกิจที่มีความสำคัญต่อประเทศไทย มี 4 ชนิด คือ ข้าวโพดไร่หรือข้าวโพดเลี้ยงสัตว์ ข้าวโพดหวาน ข้าวโพดฝักอ่อน และข้าวโพดข้าวเหนียว โดยเฉพาะอย่างยิ่งข้าวโพดหวานและผลิตภัณฑ์ที่การส่งออกเพิ่มขึ้นอย่างต่อเนื่อง ทำให้ไทยครองแชมป์ส่งออกอันดับ 1 ของโลกมาอย่างต่อเนื่องในช่วง 10 ปีที่ผ่านมา เกษตรกรที่ทำไร่ข้าวโพดมีจำนวนมากในทุกภาค เป็นแรงบันดาลใจให้ทีมวิจัยนักศึกษา คณะวิศวกรรมศาสตร์ มหาวิทยาลัยมหิดล คิดค้น “หุ่นยนต์หยอดเมล็ดข้าวโพดอัตโนมัติ” เพื่อช่วยชุมชนเกษตรกรได้ผ่อนแรงพร้อมไปกับเพิ่มคุณภาพผลผลิตด้วยนวัตกรรม

ดร.สุพรรณ ทิพย์ทิพากร หัวหน้าภาควิศวกรรมไฟฟ้า คณะวิศวกรรมศาสตร์ มหาวิทยาลัยมหิดล กล่าวว่า ทีมนักวิจัยคนรุ่นใหม่ได้ตอบโจทย์สมาร์ทฟาร์มยุคนิวนอร์มอล โดยได้ออกแบบ “หุ่นยนต์หยอดเมล็ดข้าวโพดอัตโนมัติ” เพื่อช่วยลดภาระของเกษตรกรและทำหน้าที่หยอดเมล็ดพันธุ์ข้าวโพดได้แม่นยำมากขึ้น ทีมประกอบด้วย นายธัชนนท์ ภูผิวเดือน, นายธีรภัทร ศรีสุข และ นายเจตณัฐ ปัญญาหอมโดยมี ผศ.เดชา วิไลรัตน์ อาจารย์ภาควิชาวิศวกรรมไฟฟ้า คณะวิศวกรรมศาสตร์ มหาวิทยาลัยมหิดล เป็นอาจารย์ที่ปรึกษา และเป็นที่น่ายินดีที่นวัตกรรมนี้ได้รับรางวัลจากการประกวดนักเทคโนโลยีและนวัตกรรุ่นเยาว์ด้านอิเล็กทรอนิกส์ ประเภทนักศึกษา ประจำปี 2563 อีกด้วย
ธัชนนท์ ภูผิวเดือน นักศึกษาชั้นปีที่ 4 ภาควิชาวิศวกรรมไฟฟ้า คณะวิศวกรรมศาสตร์ มหาวิทยาลัยมหิดล หนึ่งในทีมวิจัยพัฒนา กล่าวว่า จุดเริ่มต้นมาจากทางทีมวิจัยได้ลงพื้นที่สำรวจวิถีเกษตรกรชุมชนศาลายา บริเวณรอบมหาวิทยาลัยมหิดล จากการพูดคุยและสอบถาม พบว่าเกษตรกรชาวบ้านจำนวนมากนิยมใช้วิธีหว่านเมล็ดข้าวโพดด้วยมือ ส่งผลให้เกิดระยะห่างระหว่างหลุมไม่เท่ากัน รวมถึงความลึกจากการหว่านก็ไม่เท่ากัน ทำให้เมล็ดพันธุ์ที่งอกเจริญเติบโตไม่ได้ประสิทธิภาพเท่าที่ควร จึงเกิดความคิดที่จะพัฒนานวัตกรรม “หุ่นยนต์หยอดเมล็ดข้าวโพดอัตโนมัติ” นำเทคโนโลยีอัตโนมัติมาเพิ่มคุณภาพการปลูกให้ได้ผลผลิตที่ดี ช่วยลดภาระการทำงานของเกษตรกรและสามารถแบ่งเวลาไปทำอย่างอื่นได้ เช่น รดน้ำ เก็บเกี่ยว เป็นต้น
ส่วนประกอบและอุปกรณ์ มีดังนี้ 1. โครงหุ่นยนต์เป็นอะลูมิเนียมฉาก 2.มี 4 ล้อซึ่งเป็นล้อยางตัน 3. เพลาเส้นผ่านศูนย์กลาง 1 นิ้ว 4.แบตเตอรี่ 5. Wiper motor 6. IBT_2 (Board Drive Wiper Motor) 7. Stepper Motor 8. A4988 (Board Drive Stepper Motor) 9. Servo Motor 10. Rotary Encoder 11.ระบบซอฟท์แวร์ซึ่งทางทีม ใช้ควบคุมการทำงานของหุ่นยนต์ระยะไกล
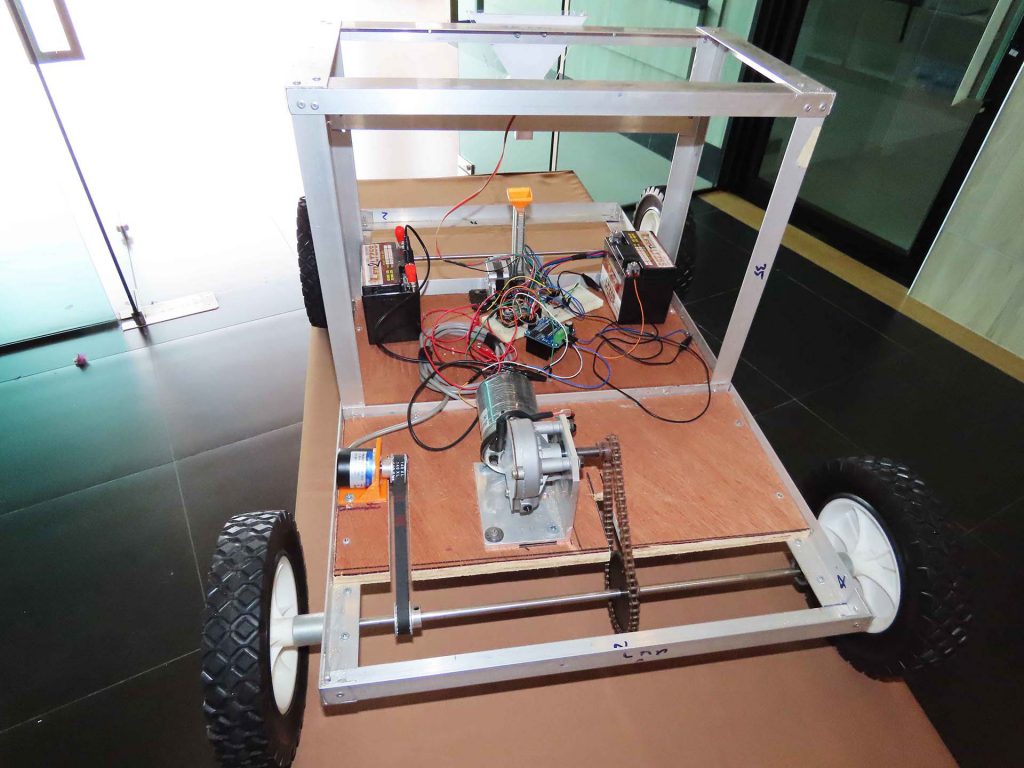
ด้าน ธีรภัทร ศรีสุข นักศึกษาชั้นปีที่ 4 ภาควิชาวิศวกรรมไฟฟ้า คณะวิศวกรรมศาสตร์ มหาวิทยาลัยมหิดล กล่าวว่า หลักการทำงานของหุ่นยนต์ ในหุ่นยนต์จะแบ่งการทำงานออกเป็น 4 ส่วนได้แก่ 1. ระบบขับเคลื่อน 2. ระบบหว่านเมล็ด 3. ระบบขุดเจาะ และ 4. ระบบควบคุมจากระยะไกล สำหรับวิธีใช้งานง่ายดาย เมื่อเปิดสวิตช์หุ่นยนต์เชื่อมการติดต่อระบบหุ่นยนต์กับสมาร์ทโฟน ระบบจะให้กรอกข้อมูลจำนวนหลุมที่เราต้องการหว่าน เมื่อคำสั่ง input จำนวนหลุมมาถึง ระบบจะสั่งการให้ DC Motor หมุนเพื่อทำการขับเคลื่อนหุ่นยนต์ จากนั้น Encoder จะทำการตรวจหาตำแหน่งของตัวหุ่นยนต์ แล้วระบบจะทำการตรวจสอบว่าหุ่นยนต์ถึงจุดที่กำหนดแล้วหรือยัง เมื่อถึงระยะที่กำหนดแล้วระบบจะสั่งการ Servo motor ให้ทำงานปล่อยเมล็ดจากจุดพักเมล็ดลงสู่ท่อเหล็กกลวง โดยระบบจะสั่งการ Step Motor ให้ทำงานเพื่อหมุนท่อเหล็กกลวงเพื่อทำการขุดเจาะ ทั้งนี้ระบบจะตรวจสอบว่าได้หยอดเมล็ดครบจำนวนหลุมที่กำหนดไว้หรือยัง เมื่อครบแล้วระบบจะหยุดทำงานทันที
จุดเด่นของ “หุ่นยนต์หยอดเมล็ดข้าวโพดอัตโนมัติ” คือ มีขนาดเล็ก น้ำหนักเบา สามารถพกพาไปได้ทุกที โดยสามารถหว่านเมล็ดด้วยระยะเท่ากันอย่างแม่นยำ สามารถสั่งการผ่านสมาร์ทโฟนได้ ประหยัดเวลาและค่าใช้จ่าย
พลังคนรุนใหม่ช่วยให้ชุมชนเกษตรกรมีคุณภาพชีวิตที่ดีขึ้นด้วยเทคโนโลยีและนวัตกรรม
เรื่องมาใหม่
- จับไอ้โก้ มือยิงสงกรานต์แม่ฮ่องสอน ทำให้บาดเจ็บสาหัส 2 ราย นำตัวทำแผน ท่ามกลางตำรวจป้องกันหลายสิบนาย
- วัดศรีบุญเรือง อ.แม่สะเรียง จัดพิธีสืบชะตา เนื่องในวันสงกรานต์เพื่อความเป็นสิริมงคล
- ผู้ว่าแม่ฮ่องสอนเยี่ยมผู้บาดเจ็บถูกลูกหลง คนร้ายสาดกระสุนวันสงกรานต์ ตำรวจรู้ตัวคนร้ายแล้ว
- แม่ฮ่องสอน ออกมาตราการคุมเข้มตรวจ เพื่อควบคุมกวดขันการจำหน่ายเครื่องดื่มแอลกอฮอล์ในช่วงเทศกาลสงกรานต์
- ผู้ว่าฯ แม่ฮ่องสอน นำพุทธศาสนิกชนชาวและนักท่องเที่ยวร่วมทำบุญตักบาตร เพื่อความเป็นสิริมงคลเนื่องในประเพณีสงกานต์ ประจำปี 2567